3.実験結果
・離陸距離(フルパワー時)
フラップ0度では10m、フラップ40度では1.0 m 以内であった。
・室内実験
機体静止・推力発生時の六分力センサによる測定は図2-1,2に、翼設計・解析ソフトXFLR51)でのシミュレーション結果は図3-1,2,3に示した。
以下、CL、CDはそれぞれ揚力係数、抗力係数であり、CL/CDは揚抗比を、αはフラップ角を指す。
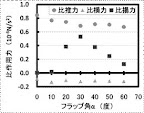
図2-1 フラップ角αと比作用力
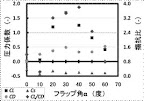
図2-2 実験機の特性
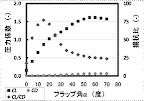
図3-1 二次元翼の特性
図3-2 フラップ角0度での圧力分布(迎角2度)
図3-3 フラップ角40度での圧力分布(迎角2度)
4.考察・フライトインプレッション
重心は平均翼弦の50%に落ち着いた。水平尾翼容積比が1.17、全翼面加重は20.6×10-5kg/dm2であるので、見た目ほど浮きは悪くない。重心を前に置くと車輪周りのモーメント大きくなり、また揚力尾翼の負担が減るので舵の効きが悪くなって離陸時のピッチアップが遅くなり、離陸距離が伸びてしまう。フラップ0度の時、離陸速度を3m/sと仮定すると、見かけのCLは主翼面積で0.56、全翼面積で0.35となる。フラップ40度の時、離陸速度を1 m/sと仮定すると、見かけのCLは同様に5.04、3.19と評価できる。このサイズの翼の最大揚力係数が1.2程度であるから、この高揚力装置による効果は大きくあると言える。
図2-1について、この結果は機体を静止させ推力を発生させた時、機体に働く力を測ったものである。縦軸はプロペラ回転数で無次元化してあるが、実際には7500rpm付近で測定した。これを見るに、30度まではαを増やしていくほど、比推力が減って比揚力が増している。本来なら比推力はほぼ一定のはずであるが二割近くも落ちており、推力が偏向されていると言える。推力の減少以上に揚力が増加しているのは、フラップダウンによるキャンバ増加に依るものであろう。10度からのグラフの立ち上がりはフラップヒンジ部での境界層剥離・再付着が疑われる。30度以降は明らかに失速しており、推力の若干の増加も流れの剥離に依るものであろう。
図2-2は図2-1から圧力係数を算出したもの、図3-1は実験機と同じ翼断面(AG4552)改変)での一様流れ中のシミュレーションである。前者の抗力係数は推力の減少分から擬似的に出した。その抗力係数が最大で通常の10倍ほど出ていることを見ても、推力偏向の効果が伺える。また、どんな翼断面でも揚力傾斜(dCL/dα)は殆ど変わらないはずであるが、二次元翼のそれに対して実験機のそれは約二倍大きい。それだけ推力偏向が貢献していると言える。
図3-1,3-2は一様流れ中の比較で、フラップをおろすと翼面全体で揚力が増すことがわかる。これはキャンバ増加によるものといえよう。
結局、この高揚力システム全体では、フラップダウンでのキャンバ増加・推力偏向によるCLの上昇、プロペラ後流による流速増加(揚力は流速の2乗に比例)、推力・地面鉛直上方成分の寄与、及び地面効果によって見かけの揚力係数が増大、結果として離陸距離が減少することが成り立っていると言える。
5.結論
プロペラ後流偏向による高揚力装置は、RC電動飛行機の簡便なSTOL化に有効である。
6.今後の展望
プロペラ後流偏向による高揚力装置を採用すると、離陸が短くなるだけでなく、非常にゆっくりと飛行でき、ペイロードも増える。翼幅をのばせば滑空比は改善するであろうし、材料・工法の改善で重量も2/3に抑えられるはずである。以上の予想から、超低速での空撮を目的とした機体を開発中である。